
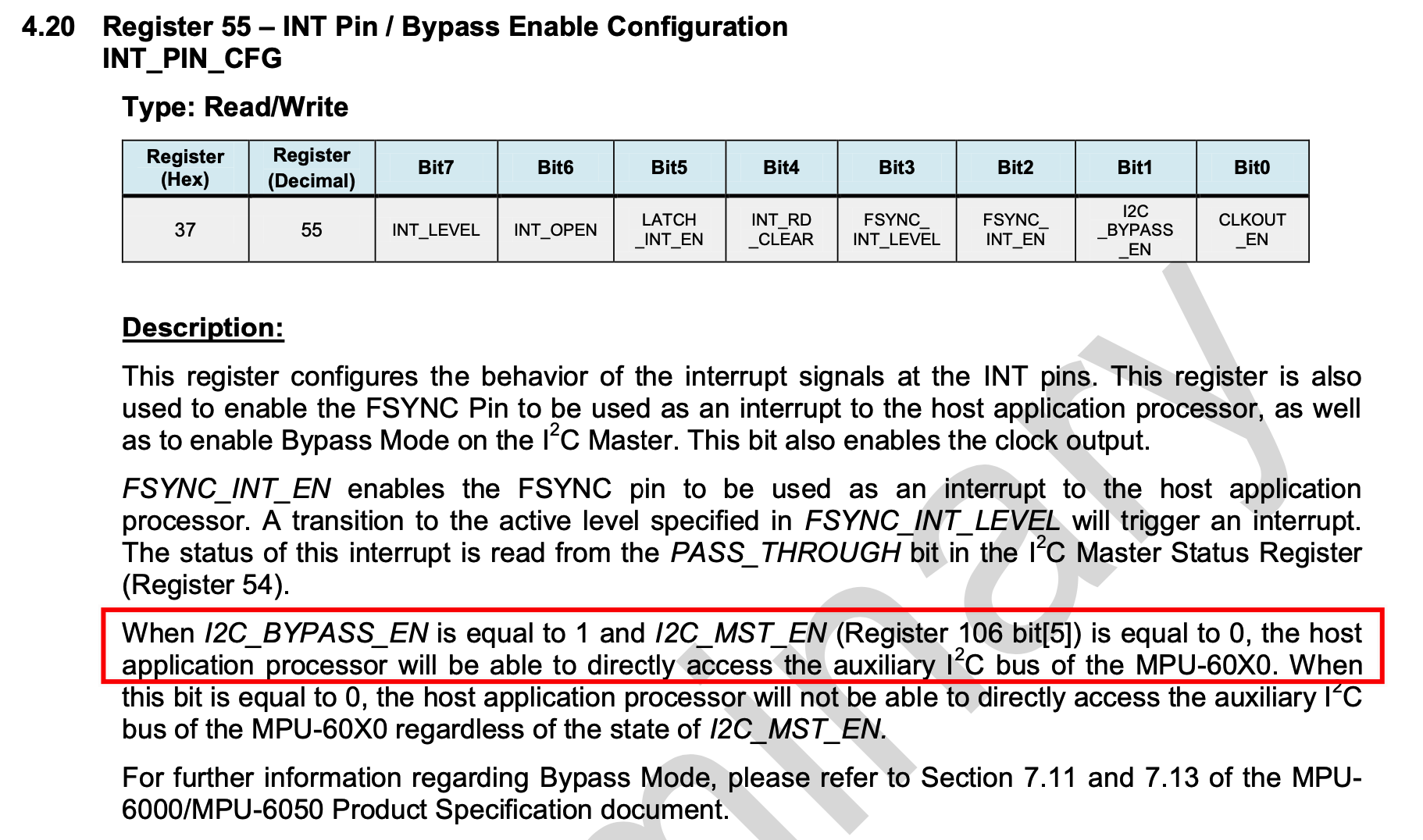
三轴磁力传感器采样的芯片,它通过I2C与MPU6050连接,默认情况下,MPU6050作为主机控制HMC5883L,stm32的I2C总线无法与HMC5883L通信。可以通过设置第55和106位寄存器放开MPU6050对从设备的控制,让从设备当作stm32的i2c总线上的设备,即可与其直接通信。
参考博客:https://blog.csdn.net/qq446252221/article/details/103959385
twentyseventeen 域的翻译加载触发过早。这通常表示插件或主题中的某些代码运行过早。翻译应在 init 操作或之后加载。 请查阅调试 WordPress来获取更多信息。 (这个消息是在 6.7.0 版本添加的。) in /var/www/html/wp/wp-includes/functions.php on line 6170三轴磁力传感器采样的芯片,它通过I2C与MPU6050连接,默认情况下,MPU6050作为主机控制HMC5883L,stm32的I2C总线无法与HMC5883L通信。可以通过设置第55和106位寄存器放开MPU6050对从设备的控制,让从设备当作stm32的i2c总线上的设备,即可与其直接通信。
参考博客:https://blog.csdn.net/qq446252221/article/details/103959385
stm32通过uart发送数据帧给上位机,上位机使用python接收数据并绘制折线图
//debug发送数据函数
#define DEBUG_PLT_START_BIT 0xfe
#define DEBUG_PLT_STOP_BIT 0xff
typedef enum dataType{
INT8_T = 0x10,
INT16_T = 0x11,
INT32_T = 0x12,
UINT8_T = 0x00,
UINT16_T = 0x01,
UINT32_T = 0x02,
FLOAT = 0x20,
CLEAR = 0x80,
}dataType_t;
//用于清空图中原有数据(程序初始化时用)
void ClearDebugPltData(int8_t dataId){
uint8_t sendData[8]={DEBUG_PLT_START_BIT, 0, CLEAR, 0, 0, 0, 0, DEBUG_PLT_STOP_BIT};
sendData[1] = dataId;
sendData[2] = CLEAR;
HAL_UART_Transmit(&DEBUG_UART, sendData, 8, 100);
HAL_Delay(1);
}
void SendDebugPltData(int8_t dataId, dataType_t dataType, void* data, uint8_t dataLen){
uint8_t sendData[8]={DEBUG_PLT_START_BIT, 0, 0, 0, 0, 0, 0, DEBUG_PLT_STOP_BIT};
sendData[1] = dataId;
sendData[2] = dataType;
memcpy(sendData + 3, data, dataLen);
HAL_UART_Transmit(&DEBUG_UART, sendData, 8, 100);
}
C发送数据代码示例
float data=10.05f; SendDebugPltData(1, FLOAT, &data, sizeof(data)); uint8_t data=100; SendDebugPltData(1, UINT8_T, &data, sizeof(data)); int32_t data=-3100; SendDebugPltData(1, INT32_T, &data, sizeof(data));
python接收串口数据并绘图代码
#-*- coding: utf-8 -*-
# uart+绘图多线程
import threading
import serial
import matplotlib.pyplot as plt
import numpy as np
import time
import re
import struct
import sys
class MyThread(threading.Thread):
def __init__(self,func,args=()):
super(MyThread,self).__init__()
self.func = func
self.args = args
def run(self):
self.result = self.func(*self.args)
def get_result(self):
try:
return self.result
except Exception:
return None
comport = "/dev/cu.usbserial-0001"#COM名称
baudrate = "115200"#波特率
maxLen=100#最大显示数据量
HEX="0123456789abcdef"
START_BIT=0xfe
END_BIT=0xff
lock = threading.Lock()
t = [0]
m = [0]
i = 0
intdata = 0
data = ''
count = 0
def initSerial():
global serialport
serialport = serial.Serial(comport, int(baudrate), timeout=1)
if serialport.isOpen():
print("open success")
else:
print("open failed")
def SerialReceive():
global t,m,serialport,i
rawData=b''
numData=b''
while True:
while True:
ch = serialport.read()
#print(type(ch),type(rawData))
rawData+=ch
if(len(rawData)>8):
rawData=rawData[len(rawData)-8:]
#print(rawData)
if (len(rawData)==8) and (rawData[0]==START_BIT) and (rawData[7]==END_BIT):
break
numData=rawData[3:7]#数值位
dataId=rawData[1]#数据编号
dataType=rawData[2]#数据类型
signed=(dataType & 0x10) > 0#是否含符号位
decimal=(dataType & 0x20) > 0#是否为小数
if dataType==0x80:
lock.acquire()
i=0
t=[]
m=[]
plt.cla()
lock.release()
rawData=b''
continue
print(f"dataId:{dataId} signed:{signed} decimal:{decimal} dataType:{dataType}")
#print(f"{HEX[numData[0]//16]}{HEX[numData[0]%16]}{HEX[numData[1]//16]}{HEX[numData[1]%16]}{HEX[numData[2]//16]}{HEX[numData[2]%16]}{HEX[numData[3]//16]}{HEX[numData[3]%16]}")
if not decimal:
if (dataType & 0x0f == 0x00):
data = int.from_bytes(numData[:1], byteorder='little', signed = signed)
elif (dataType & 0x0f == 0x01):
data = int.from_bytes(numData[:2], byteorder='little', signed = signed)
else:
data = int.from_bytes(numData[:4], byteorder='little', signed = signed)
else:
data = struct.unpack('f', numData)[0]
i = i+1
print(i,data)
lock.acquire()
t.append(i)
m.append(data)
lock.release()
rawData=b''
def StartSerialReceive():
thread = MyThread(SerialReceive,args=())
thread.setDaemon(True)
thread.start()
def initPlt():
plt.grid(True) # 添加网格
plt.ion() # interactive mode
plt.figure(1)
plt.xlabel('times')
plt.ylabel('data')
plt.title('Diagram of UART data by Python')
def drawPlt():
global t,m
if not lock.locked():
lock.acquire()
if len(t) > maxLen: # 清除画布,重新开始,避免数据量过大导致卡顿。
t = t[len(t)-maxLen:]
plt.cla()
if len(m) > maxLen: # 清除画布,重新开始,避免数据量过大导致卡顿。
m = m[len(m)-maxLen:]
plt.cla()
lock.release()
lock.acquire()
plt.plot(t, m, '-r')
plt.draw()
lock.release()
print(sys.argv)
if (len(sys.argv) > 2):
if (sys.argv[1]=="-len"):
maxLen = int(sys.argv[2])
print(f"最大数据长度修改为{maxLen}")
initSerial()
initPlt()
StartSerialReceive()
while True:
drawPlt()
plt.pause(0.002)
main.c中添加以下代码使能中断
HAL_TIM_Base_Start_IT(&htim3);